VL6180X ToF 거리 센서
일반
Time-of-Flight(ToF) 기술을 사용해 가까이 있는 (5~100mm) 물체와의 거리를 정밀하게 측정하는 광학 거리 센서이며 조도 센서가 통합되어 있습니다. I2C 인터페이스를 사용합니다.
사양
- Power Supply Voltage: 3.3V~5V
- Operating Current: <5mA
- Measuring Distance: 5-100mm
- Emitter: 940nm invisible laser (VCSEL)
- I2C Address: 0x29
- Operating Temperature Range: -20℃~85℃
사용 가능한 GPIO
- 라즈베리파이 0~4
- 라즈베리파이 5
- 비글본 블랙/그린
- 젯슨 나노
- FT232H, FT2232H, FT4232H
- MCP2221
명령
[READ_RANGE]
물체와의 거리를 측정합니다. 측정 에러가 없을 때 (상태 코드 = 0)만 측정 거리가 유효함에 유의합니다.
| 항목 | 타입 | 설명 |
|---|---|---|
| 거리 (mm) | READ | 측정된 물체와의 거리입니다. |
[READ_RANGE_STATUS]
거리 측정 결과를 상태 코드로 반환합니다. 이 명령은 READ_RANGE가 실행된 이후에 실행되어야 합니다.
| 항목 | 타입 | 설명 |
|---|---|---|
| 상태 코드 * | READ | 측정 결과 상태 코드입니다. (0: 에러 없음, 그 외: 에러 발생) |
* 상태 코드에 대한 설명은 아래와 같습니다.
0 : Success (No Error)
1 : System error
5 : System error
6 : Early convergence estimate fail
7 : No target detected
8 : Ignore threshold check failed
11 : Ambient conditions too high
12 : Raw range algo underflow
13 : Raw range algo overflow
14 : Raw range algo underflow
15 : Raw range algo overflow
0 : Success (No Error)
1 : System error
5 : System error
6 : Early convergence estimate fail
7 : No target detected
8 : Ignore threshold check failed
11 : Ambient conditions too high
12 : Raw range algo underflow
13 : Raw range algo overflow
14 : Raw range algo underflow
15 : Raw range algo overflow
[READ_LUX]
조도(밝기)를 측정합니다.
| 항목 | 타입 | 설명 |
|---|---|---|
| gain | WRITE | 조도 측정을 위한 증폭 (gain) 값을 설정합니다. 어두운 환경에서는 높은 값을, 밝은 환경에서는 낮은 값을 사용합니다. |
| 조도 (lux) | READ | 측정된 조도 (밝기) 입니다. |
[SET_ADDR]
I2C 주소를 설정합니다.
| 항목 | 타입 | 설명 |
|---|---|---|
| I2C 주소 | WRITE | 설정할 I2C 주소를 입력합니다. (예: 0x29) |
예제
목표
센서에서 측정된 거리를 대시보드 레이블 위젯으로 표시합니다.
부품
| 부품 | 갯수 |
|---|---|
| 라즈베리파이 4 * | 1 |
| VL6180X | 1 |
* 다른 하드웨어를 사용할 수도 있습니다. 사용 가능한 GPIO를 참고하세요.
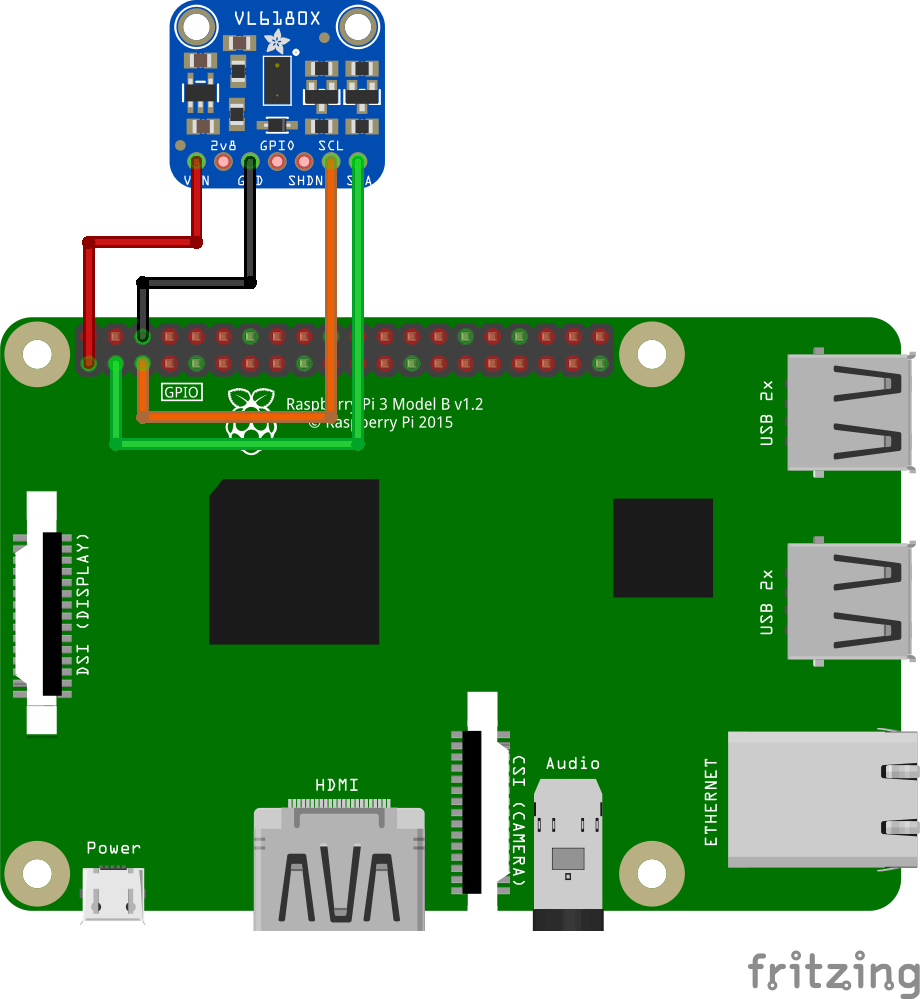
연결
| VL6180X | GPIO |
|---|---|
| VCC | 3.3V |
| GND | GND |
| SCL | 3 (I2C1 SCL) |
| SDA | 2 (I2C1 SDA) |